1. Performance Report
DDK Nav Performance Report
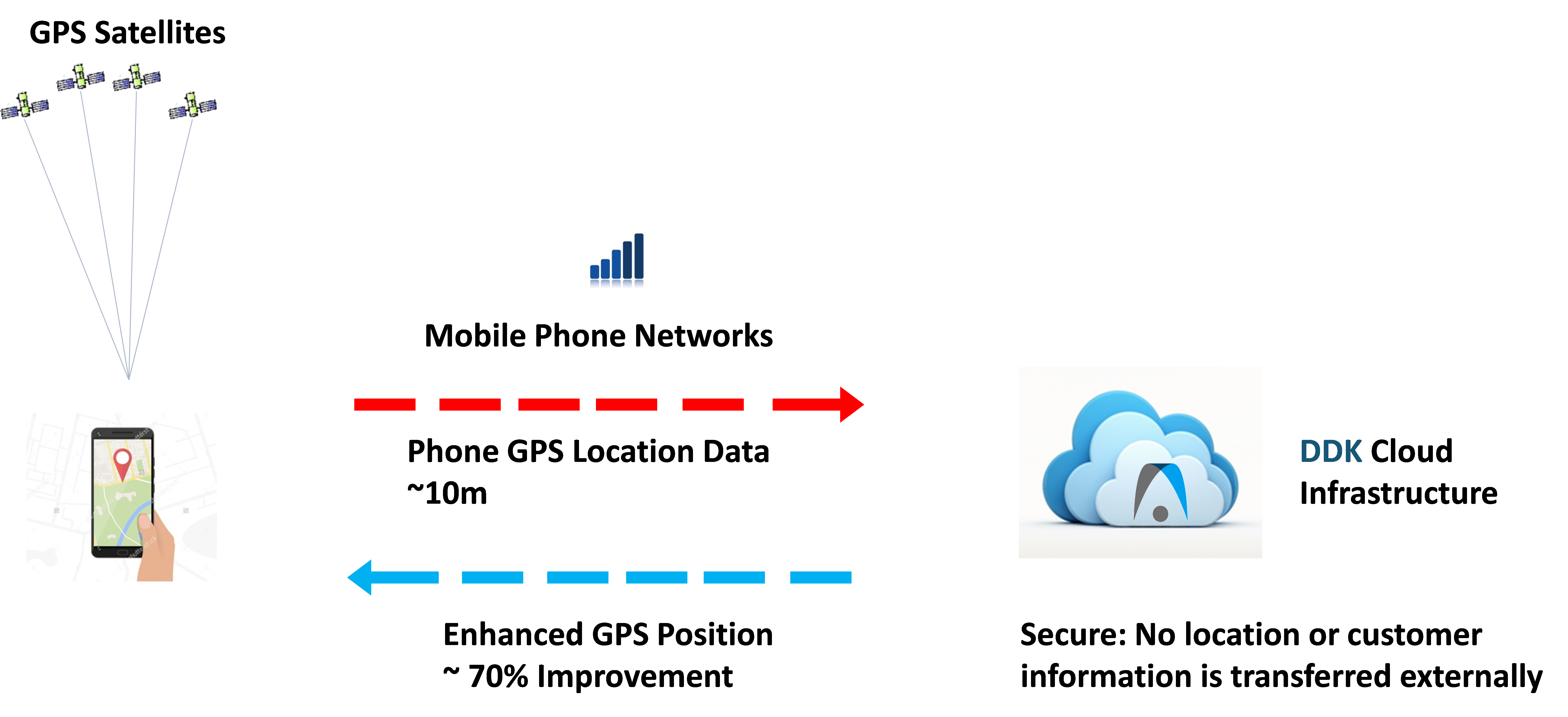
DDK Positioning Mobile Phone Solution reduces and removes the following elements of the GPS error budget in real time:
- Ionosphere
- GPS Clock
- GPS Orbit
- Troposphere
(Note the mobile phone receiver and multipath are not mitigated as part of this service, any receiver/multipath or external error introduced to the mobile solution will affect the final solutions beyond the control of the DDK Positioning Enhanced Service.)
The DDK Positioning mobile phone service uses the internally generated mobile phone location data and feeds this back to the DDK Servers where the above listed errors are removed.
2. Methodology
In order to determine the positional accuracy of the DDK Positioning Mobile service, the results need to be compared to a ‘truth’ solution that enables the accuracy levels to be reported.
This can be completed using two methodologies:
Static – Compare the DDK Position mobile phone solution to a coordinate point that has been surveyed in using a geodetic receiver
Dynamic – Operate the DDK Positioning mobile phone solution dynamically and compare to a Survey Grade GPS receiver that will log data at the same time – providing a ‘baseline’ solution that can be used to compare the mobile phone results.
The method used in this report is the dynamic option.
3. Dynamic GPS Comparison
The following equipment was used for the dynamic GPS comparison test:
- Mobile Phone – Motorola G3, running android operating system
- Survey Grade GPS - Trimble BD920, Trimble Zephr Geodetic Antenna
- Processing – 3rd Party Processing Suite
The RAW dual frequency GPS measurements were collected at 1 second intervals on the Survey Grade GPS receiver, these RAW measurements were then sent to a 3rd party GPS processing suite to provide the corrected position for each RAW measurement made.
On the phone, the following files were logged:
- Standard GPS output computed by the mobile phone (CSV format)
- DDK Enhanced GPS Position (CSV Format)
The logged files were taken in 1 second intervals.
Note, the Mobile phone and Trimble Zephr were located next to each other, and these results in a zero baseline between solutions – removing the requirement for any additional sensors (Gyro) to be used in this test.
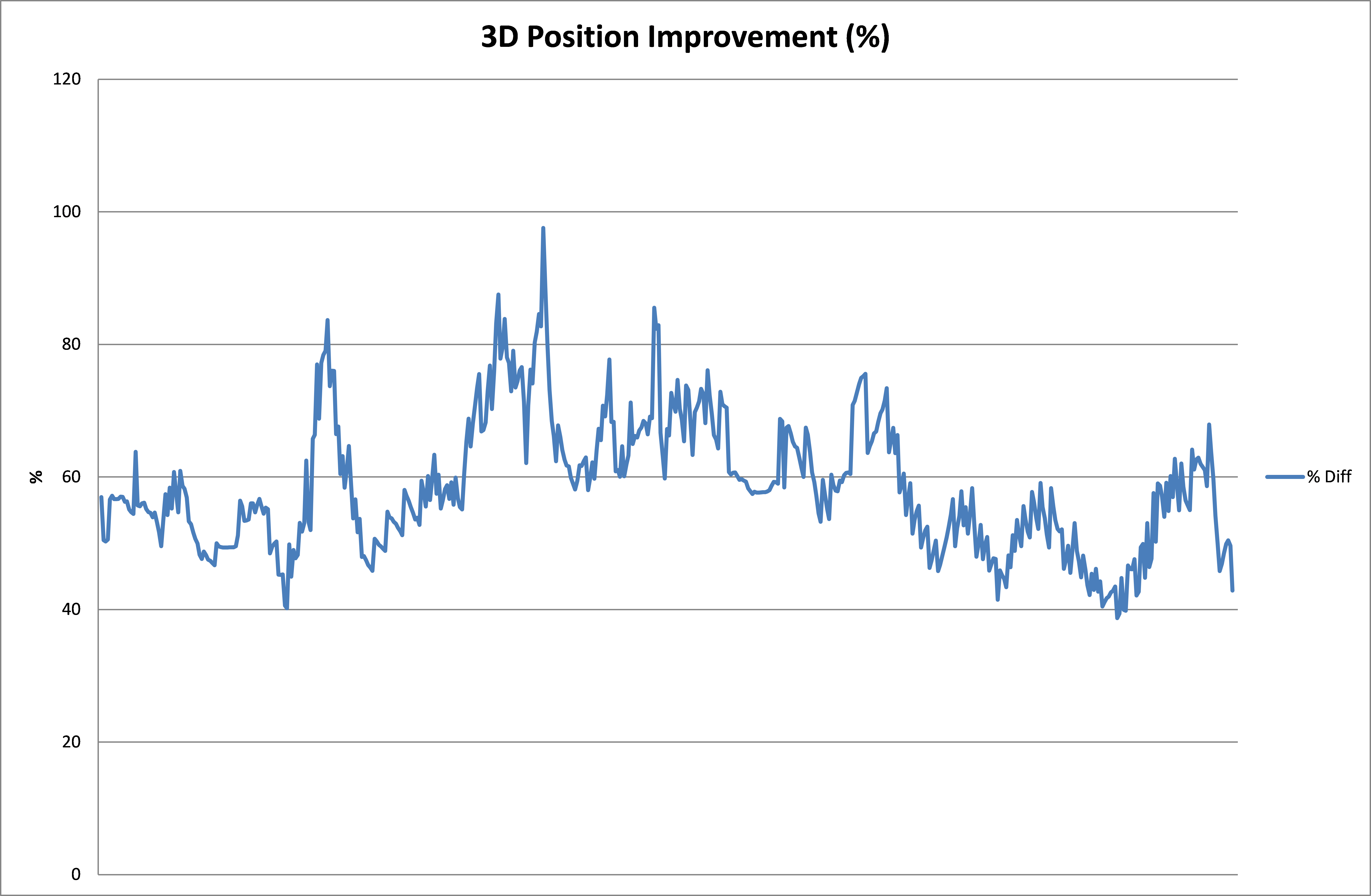
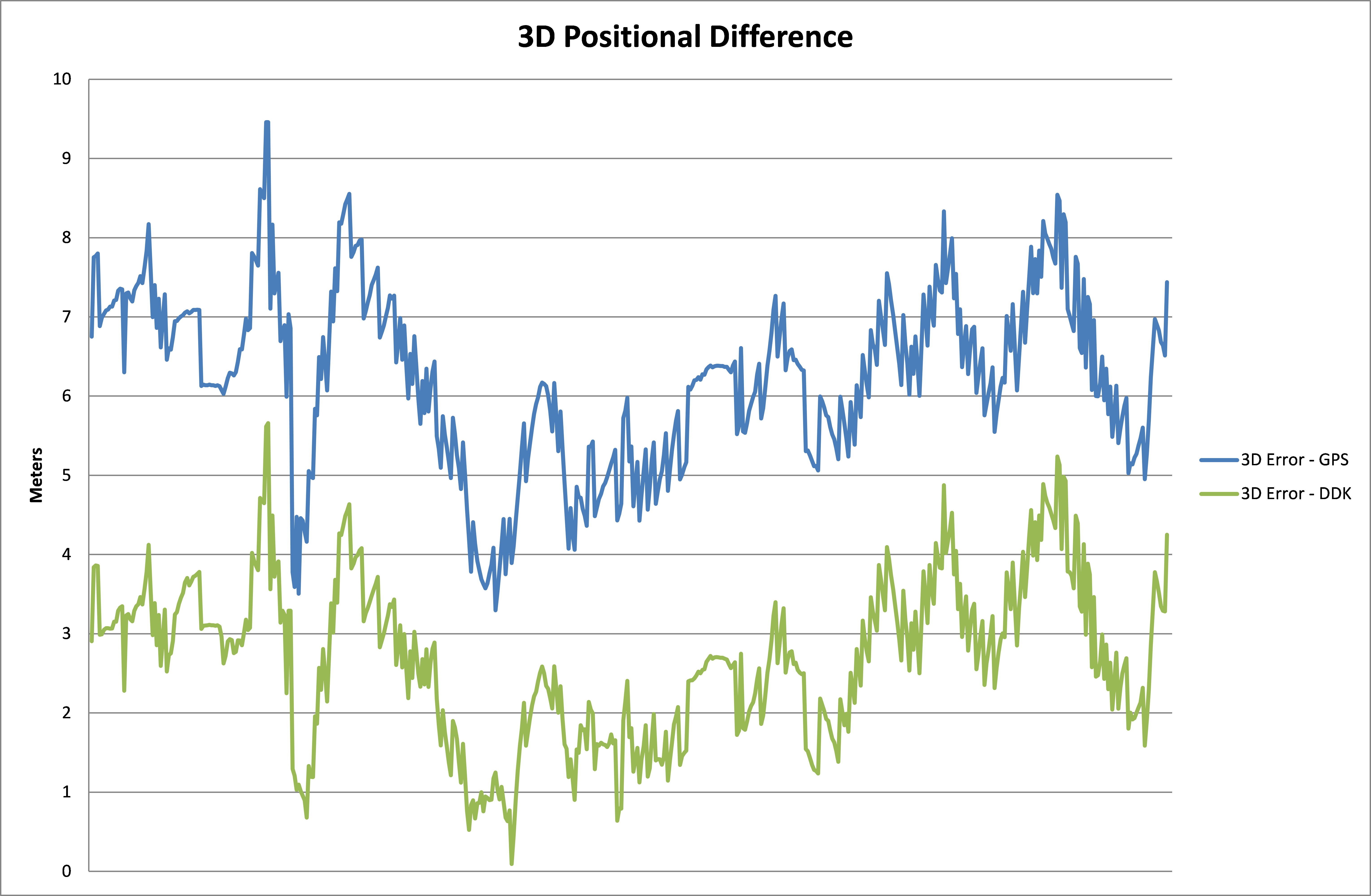
4. Performance Results
The following plots were generated: