GNSS Notes
1. What is GPS?
The Global Positioning System (GPS) is a network of about 30 satellites orbiting the Earth at an altitude of 20,000 km. The baseline satellite constellation consists of 24 satellites positioned in six earth-centred orbital planes with four operation satellites and a spare satellite slot in each orbital plane. The system can support a constellation of up to 32 satellites in orbit.
The system was developed by the US government for military navigation but anyone with a GPS device, be it a SatNav, mobile phone or handheld GPS unit, can receive the radio signals that the satellites broadcast.
Wherever you are on the planet, at least four GPS satellites are ‘visible’ at any time. Each one transmits information about its position and the current time at regular intervals. These signals, travelling at the speed of light, are intercepted by your GPS receiver, which calculates how far away each satellite is based on how long it took for the messages to arrive.
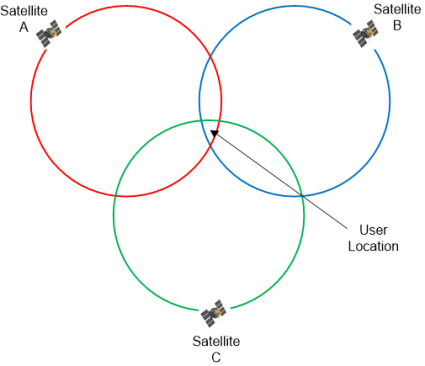
Once it has information on how far away at least three satellites are, your GPS receiver can pinpoint your location using a process called trilateration.
Imagine you are standing somewhere on Earth with three satellites in the sky above you. If you know how far away you are from satellite A, then you know you must be located somewhere on the red circle. If you do the same for satellites B and C, you can work out your location by seeing where the three circles intersect. This is just what your GPS receiver does, although it uses overlapping spheres rather than circles.
The more satellites there are above the horizon the more accurately your GPS unit can determine where you are.
2. Sources of Errors in GPS and their Correction
-
Satellite Geometry
-
Satellite Orbits
-
Multipath Effect
-
Atmospheric Effects
-
Clock Inaccuracies and Rounding Errors
a. Satellite Errors:
- Slight inaccuracies in time keeping by the satellites can cause errors in calculating positions.
- Satellites drift slightly from their predicted orbits which contribute to errors.
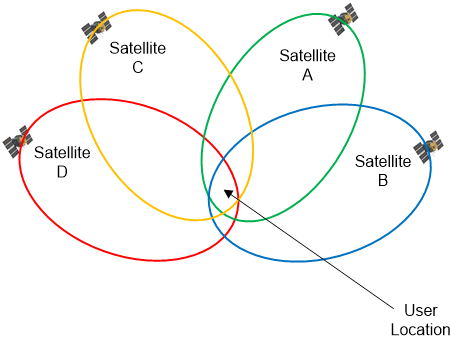
When a GPS receiver receives signals from 4 satellites, then there are two cases:
CASE 1
The satellites are at 90° to each other with respect to the GPS receiver. The possible positions are marked by the light green circles. The point of intersection of the circles is a rather small, more or less quadratic field; the determined position will be potentially accurate due to the optimal geometric intersections.

CASE 2
As per the actual constellation, satellites are not at 90° to each other with respect to the GPS receiver, which manifests in a weaker geometric intersection, and will be less accurate.
b. Satellite Orbits:
- Slight shifts of the orbits are possible due to gravitation forces
- Sun and moon have a weak influence on the orbits, the resulting error being approximately 2m
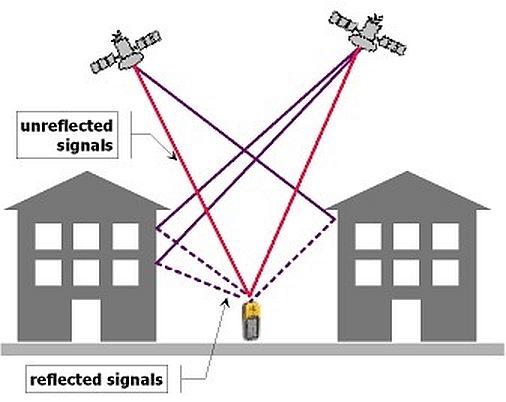
c. Multi-path error: As the GPS signal finally arrives at the earth’s surface, it may be reflected by local obstructions before it gets to the receiver’s antenna. This is called multi-path error as the signal is reaching the antenna in single line path as well as delayed path.
The multipath effect is caused by reflection of satellite signals (radio waves) on objects. For GPS signals this effect mainly appears in the vicinity of large buildings or other elevations. The reflected signal takes more time to reach the receiver than the direct signal. The resulting error typically will result in a few meters of error.
d. Atmospheric Effects:
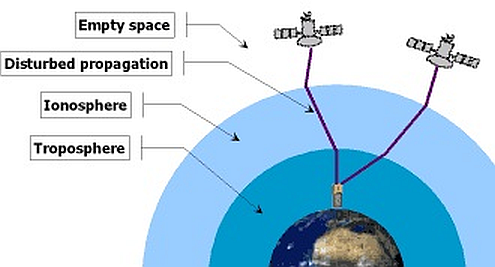
The GPS signals have to travel through charged particles and water vapours in the atmosphere which delays its transmission. Since the atmosphere varies at different places and at different times, it is not possible to accurately compensate for the delays that occur.
While radio signals travel with the velocity of light in the outer space, their propagation in the ionosphere and troposphere is slower. In the ionosphere (consisting of layers) in a height of 80 – 400 km a large number of electrons and positive charged ions are formed by the ionizing force of the sun. The layers refract the electromagnetic waves from the satellites, resulting in an elongated runtime of the signals.
The reasons for the refraction in troposphere are different concentrations of water vapours, caused by different weather conditions. The error caused by tropospheric conditions are much smaller than the ionosphere error, but cannot be eliminated by calculation. It can only be approximated by a general calculation model.
e. Receiver Error:
Since the GPS receivers (Smart phones) are not perfect, they can introduce their own errors which usually occur from their clocks or internal noise and antennas used. Despite the synchronization of the receiver clock with the satellite time during the position determination, the remaining inaccuracy of the time still leads to an error of about 2 m in the position determination. Rounding and calculation errors of the receiver sum up approximately to 1m.
f. Total error Budget
The total error budget for the GPS receiver (smart phone) is listed below, and compared to the potential positional accuracy that can be achieved using the DDK Positioning real time enhancement:
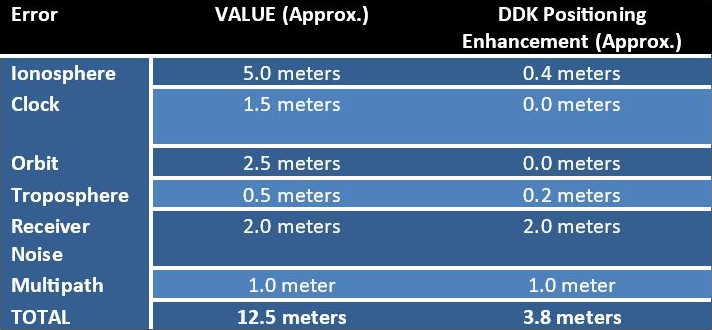
Resulting up to 70% improvement over the standard GPS positioning generated in a smartphone.
3. Methods of Correcting GPS Errors
In order to remove the errors that are experienced in GPS measurements, the following methods are available to remove the errors:
- Real Time Correction methods
- Real Time Kinematic / Differential GPS
- Precise Point Positioning
- Post-Processing Correction
- DDK Positioning Enhanced Positioning Service
g. Real Time Correction (RTK/Differential GPS) - A base station that is on a fixed known point and broadcasts corrections for each satellite as it receives the data.
-
The correction is received by the roving receiver via a radio signal and applied to the position it is calculating in real time
-
As a result, the position displayed on the roving GPS receiver is a differentially corrected position.
-
Various methods are available i.e. RTK and DGPS and can offer accuracy levels from 1.0m – 0.02m (Receiver dependent)
-
These methods require the user GPS receiver to be in the vicinity of the ‘base station’ in order to generate the corrections.
h. Real Time Correction (Precise Point Positioning)
-
A global network of GPS receiver monitor the GPS satellites and determine the orbit and clock errors for each satellite
-
The corrections are sent to the user receiver and applied in real time
-
Ionospheric error is removed using a dual frequency GPS receiver, or if a single frequency receiver is used, Ionospheric correction data is applied in real time
-
Tropospheric error model is applied in real time
-
A kalman filter is used at the user end to determine the final solution (0.1 – 0.2m) globally.
i. Post Processing Correction
-
Differentially correcting GPS data by post-processing uses a base GPS receiver that logs positions at a known location and a rover GPS receiver that collects positions in the field.
-
The files from the base and rover are transferred to the office processing software, which computes corrected positions for the rover's file.
j. DDK Positioning Enhanced Positioning Service
The service used by DDK Positioning to enhance the GPS positioning within the smart phone has been developed to work globally and in real time where the user has access to a mobile phone data connection.
4. Constraints
The DDK Enhanced Positioning service works with both GPS and Glonass enabled smartphones, and will also work with Galileo enabled smart phones as they come on line.
The service will NOT work if your smartphone is using SBAS as part of the GPS calculation.
The service is open to any other phone that uses GPS for location services.
The Enhanced service will be available to users who use the application, and it will also work with GPS Toolbox. All other applications will continue to use the phones generated GPS location, if you want to use the enhanced location in other applications please contact them and let them know that you wish to use the DDK Enhanced service within the applications, or contact DDK Positioning, and we can supply the API for third parties to implement within their application.
5. Future
The enhanced DDK Positioning service that is delivered to the smartphone in real time is the first phase of the DDK Positioning service offering. The second phase will be delivering a solution to users of smartphones enabled with RAW data measurements, this second phase of service will enable 0.5 meter accuracy levels to be delivered to smartphone in real time.